详读 · DexMimicGen(双手灵巧操作数据自动生成)¶
卡片版见 卡片-DexMimicGen。本页是全文精读:动机 → 逐模块方法(少量人示范 → 自动放大成大规模双手演示)→ 全量数字表 → 局限/洞见 → 外部评价 → 对我们。 来源:arXiv 2410.24185 v2(2024-10,v2 2025-03-06)· 项目页 · ICRA 2025 作者:Zhenyu Jiang、Yuqi Xie、Kevin Lin(共同一作)、Zhenjia Xu、Weikang Wan、Ajay Mandlekar、Linxi "Jim" Fan、Yuke Zhu(NVIDIA Research + UT Austin + UC San Diego)
0. 一句话定位¶
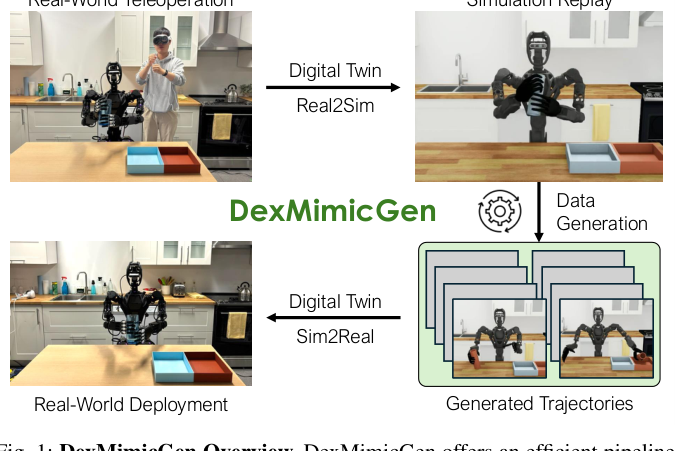
把 MimicGen(单臂+平行夹爪的"少示范→海量数据"自动生成系统)扩展到双臂 + 多指灵巧手(人形):用极少人示范(60 条),靠"按物体坐标系做 SE(3) 变换 + 物理仿真回放筛成功"自动放大到 21K 条演示,喂给模仿学习(BC-RNN / DP)。核心增量是处理双臂协调——把子任务分成并行 / 协调 / 顺序三类并各给一套执行机制。最终走通 real2sim2real,真机人形罐子分拣 90% 成功率(纯人示范为 0%)。
1. 问题与动机¶
- 模仿学习靠人示范,采数是瓶颈:单臂场景已要多操作员、多机器人、数月人力。
- 双臂+灵巧手(人形)更难:要同时控两条臂 + 多指手 → 操作员负担陡增、采数速率更低;而高 DoF / 任务更复杂 → 数据需求又更大。两头夹击。
- 已有遥操接口(Bunny-VisionPro / OpenTelevision / OmniH2O / HumanPlus 等)能做人形遥操,但贵、难 scale。
- 思路:仿真里自动生成数据(单臂已被 MimicGen 等证明有效)。DexMimicGen = 把这条路打通到双手灵巧场景。
2. 前置:继承自 MimicGen 的机制与三条假设¶
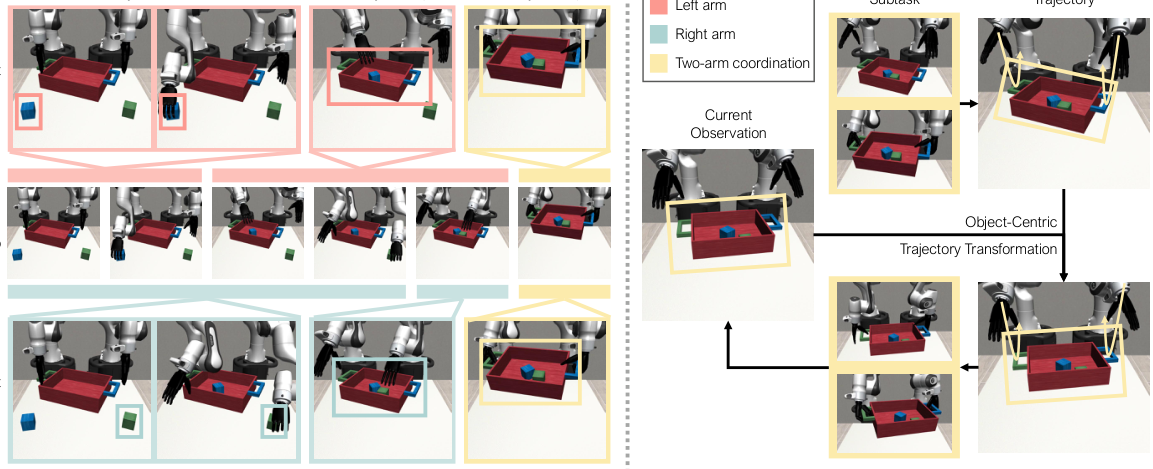
- 核心机制(SE(3) 等变):机器人动作相对物体位姿具备 SE(3) 等变性——物体位姿做了某个 SE(3) 变换,对机器人动作施加同一个变换即可在新物体位姿下复现等效操作。
- MimicGen 把任务拆成以物体为中心的子任务序列
S1(o1),…,SM(oM),每段轨迹是一串末端位姿(T^{C0}_W,…,T^{CK}_W);新场景下观测当前物体位姿,用常量变换T^{o'}_W (T^{o}_W)^{-1}把源段位姿整体搬过去(保持末端↔物体相对位姿),再插值衔接当前状态,开环执行该段,逐子任务拼接;全任务成功才保留。 - 三条假设(沿用 MimicGen):
- A1 动作空间 = 每条臂的「末端位姿指令 + 手的驱动指令」(平行夹爪 1-D 开合;灵巧手 6-D 关节指令)。
- A2 任务可拆成以物体为中心的子任务。
- A3 采数时,机器人接触某物体之前该物体位姿可被观测/估计。
3. 方法核心:双臂三类子任务¶
MimicGen 只有"单一子任务序列",无法表达双臂的独立 / 互依 / 定序。DexMimicGen 引入子任务分类法(图2)并各配执行策略。
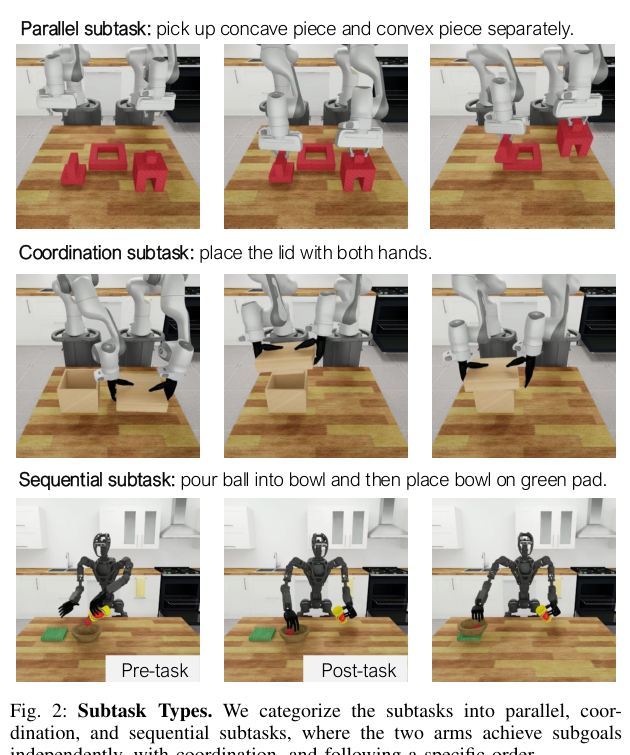
3.1 并行子任务(Parallel,IV-A)¶
两臂各干各的、可在不同时刻完成(如装配任务里两手各抓一块)。把任务建成每条臂各自的子任务序列,源演示按臂分段。执行用异步执行(asynchronous execution):每条臂各维护一个动作队列,并行逐步出队;某臂队列空了就用"下一子任务的变换后段"填充——不要求两臂子任务对齐。
3.2 协调子任务(Coordination,IV-B)¶
需精确配合(如 Box Cleanup 双手合盖):执行时两末端的相对位姿必须与源演示一致。做法:① 两臂轨迹用同一个变换矩阵生成;② 同步执行(synchronization)——分段时强制协调子任务同一时刻结束,执行时每条臂等另一条,直到二者剩余步数相同再对齐收尾。
- 两种取变换的方案:Transform(按第一条臂进入协调子任务时的物体位姿算 T^{o'}_W(T^{o}_W)^{-1})vs Replay(直接照搬源轨迹、不做变换)。Replay 对 handover(交接)类有利:保证轨迹落在运动学可行范围内、可完整执行(Can Sorting / Transport 的交接相用 Replay)。
3.3 顺序子任务(Sequential,IV-C)¶
需定序(如 Pouring:先一只手把球倒入碗、另一只手才能把碗搬到垫)。用顺序约束(ordering constraint):指定 pre-subtask / post-subtask,执行 post 的那条臂必须等另一条臂的 pre 完成才继续。
3.4 整体流程(IV-D,以 Tray Lift 为例)¶
 1. 源演示按臂分段(启发式 or 人工标注),末段标为协调子任务(两手须一起抬盘)。
2. 生成时随机化场景、选一条源演示;按臂并行逐子任务生成+执行轨迹;协调段用同步执行。
3. 手指动作直接回放源演示的手指关节动作(因手指运动总是相对末端运动而言的)。
4. 每条只在任务成功时保留,重复直到攒够数据。
1. 源演示按臂分段(启发式 or 人工标注),末段标为协调子任务(两手须一起抬盘)。
2. 生成时随机化场景、选一条源演示;按臂并行逐子任务生成+执行轨迹;协调段用同步执行。
3. 手指动作直接回放源演示的手指关节动作(因手指运动总是相对末端运动而言的)。
4. 每条只在任务成功时保留,重复直到攒够数据。
人 vs 自动的边界(附录):人只负责①遥操采源演示、②(可选)标子任务边界、③指定哪些是协调/顺序子任务(默认全是并行)。其余全自动。成功判定靠每任务写的 success-check(多看最终状态,如物体是否进目标容器)。碰撞不显式处理——部分生成失败就来自轨迹撞到工作区物体,作者计划用 SkillMimicGen 的运动规划模块补。
4. 系统设计(V)¶
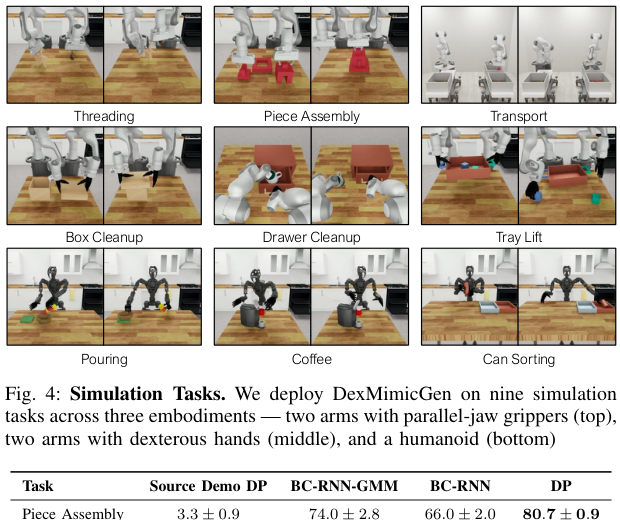
- 仿真:RoboSuite + MuJoCo。三类本体 ×各 3 任务 = 9 个任务:
- ① 双 Panda 臂 + 平行夹爪;② 双 Panda 臂 + 灵巧手;③ Fourier GR-1 人形 + 灵巧手。
- 控制器:Panda 用 OSC(操作空间控制);人形用基于 mink 的 IK 控制器(处理"双臂连一个躯干"的复杂运动学树);手指用关节位置控制。
- 任务覆盖高精(Threading 穿线 / Piece Assembly / Box Cleanup / Coffee)、铰接物体(Drawer)、长程(Transport),含协调任务(Threading/Transport/Box Cleanup/Tray Lift/Can Sorting)与顺序任务(Piece Assembly/Drawer Cleanup/Pouring/Coffee)。还有更宽初始分布的变体
D1/D2。 - 遥操采源演示:平行夹爪用 iPhone(RoboTurk 式,抓腕+夹爪);灵巧手用 Apple Vision Pro(VisionProTeleop 取腕+手指位姿)+ 人机标定,手指重定向用 OmniH2O 的方法。
5. 实验数字(全量)¶
设置:平行夹爪任务采 10 条源演示、灵巧手任务采 5 条(手负担更重),各放大到 1000 条训练 visuomotor 策略(BC-RNN / BC-RNN-GMM / Diffusion Policy)。每实验 3 seed、取每 seed 最大成功率。60 源演示总计 → 21K 演示(含多任务×1000、规模/变体/BiGym 等)。
5.1 表I:源演示-only vs DexMimicGen 数据(1000 条,3 seed)¶
第一列=只用源演示训练(DP);后三列=用 DexMimicGen 数据训练的不同策略。
| 任务 | 源演示(DP) | BC-RNN-GMM | BC-RNN | DP |
|---|---|---|---|---|
| Piece Assembly | 3.3±0.9 | 74.0±2.8 | 66.0±2.0 | 80.7±0.9 |
| Threading | 1.3±0.9 | 54.0±4.3 | 68.0±1.6 | 69.3±1.9 |
| Transport | 52.7±7.7 | 64.0±3.3 | 57.3±4.1 | 83.3±0.9 |
| Box Cleanup | 62.0±1.6 | 64.0±10.0 | 94.7±0.9 | 92.0±4.3 |
| Drawer Cleanup | 0.7±0.9 | 30.7±5.0 | 80.0±0.0 | 76.0±0.0 |
| Tray Lift | 3.3±0.9 | 66.0±8.2 | 78.0±2.0 | 88.7±0.9 |
| Pouring | 0.7±0.9 | 74.0±8.6 | 62.0±7.5 | 79.3±0.9 |
| Coffee | 14.7±0.9 | 12.0±1.6 | 84.7±4.9 | 77.3±0.9 |
| Can Sorting | 0.7±0.9 | 75.3±1.9 | 96.0±4.3 | 97.3±0.9 |
标志性提升:Drawer Cleanup 0.7%→76.0%、Threading 1.3%→69.3%、Piece Assembly 3.3%→80.7%。DP 普遍最强;有趣的是 BC-RNN-GMM 在灵巧手任务上常逊于 BC-RNN / DP,与 RoboMimic 当年"GMM 头有益"的结论相反。
5.2 表II:更宽初始分布(同分布评测)¶
| 任务 | 策略 | D0 | D1 | D2 |
|---|---|---|---|---|
| Piece Assembly | BC-RNN-GMM | 74.0±2.8 | 67.3±0.9 | 44.0±3.3 |
| Box Cleanup | BC-RNN | 96.7±2.5 | 88.0±5.9 | 78.7±2.5 |
| Pouring | DP | 79.3±0.9 | 82.0±2.0 | 71.3±2.5 |
DexMimicGen 能从
D0源演示生成更宽D1/D2分布的数据,且策略在对应宽分布上仍可用(分布越宽越难,成功率随之下降)。
5.3 表III:vs Demo-Noise 基线(1000 条)¶
| 任务 | 策略 | Demo-Noise | DexMimicGen |
|---|---|---|---|
| Piece Assembly | BC-RNN-GMM | 12.7±3.4 | 74.0±2.8 |
| Tray Lift | BC-RNN | 16.7±2.5 | 75.3±7.5 |
| Pouring | DP | 26.7±2.5 | 79.3±0.9 |
Demo-Noise = 同源演示、加动作噪声回放。DexMimicGen 全任务领先 >58%;且 Demo-Noise 无法生成 D1/D2(只能复现源初始构型)。
5.4 其它消融 / 规模数字¶
- 数据规模(100/500/1000/5000):100→500→1000 显著涨;1000→5000 不总涨(部分任务边际递减)。
- 协调子任务 Replay vs Transform:Transport 63.3% vs 46.0%(Replay 胜);Can Sorting 97.3% vs 98.6%(相当)→ handover 默认用 Replay。
- 顺序约束:Drawer Cleanup 50.7% vs 48.0%、Pouring 88.7% vs 76.7%(有约束更好);直接两臂用同一条源演示则 Drawer 56.7% / Pouring 79.3%(省事但少多样性)。
- 跨基准(BiGym):FlipCup / DishwasherLoadPlates / CupBoardsCloseAll 三任务数据生成成功率 29.1% / 43.6% / 76.4%。
- 附录 PCA(TwoArmCoffee):DexMimicGen 显著扩展末端动作的分布覆盖;但手指关节动作主要是局部插值、不大幅扩张(因手指动作靠回放)。
5.5 真机评测(VI-D)¶
- 硬件:Fourier GR-1 + 两只 6-DoF Inspire 灵巧手;视觉 = 2× Intel RealSense D435i(头戴第一视角 + 前方第三视角)。
- 任务:Can Sorting(罐子分拣)。Real2Sim:头戴相机取 RGB-D + GroundingDINO 分割物体 + 深度均值定 x-y 初始化数字孪生。
- 流程:采 4 条真机源演示 → 在数字孪生里用 DexMimicGen 生成;数字孪生先在仿真里跑通才把动作发到真机执行(仿真当"安全闸")→ 自动攒到 40 条成功真机演示。
- 结果:DP 训于 40 条 DexMimicGen 数据 → 90% 成功(红/蓝杯各 10 试);训于 4 条源演示 → 0%。
(注:真机 rollout 帧见原文 Fig 6;此处复用总览图示意 real2sim2real 闭环。)
6. 局限 / 存疑(诚实)¶
- 强依赖仿真可建模:本质是"仿真里变换+回放+成功筛"。需要数字孪生、success-check、物体位姿可估(A3)——接触/可形变/流体类难仿的任务不在覆盖内。
- 手指动作不放大:手指靠回放源演示、PCA 证实只局部插值 → "灵巧"的多样性其实来自源演示,DexMimicGen 主要放大的是臂的末端轨迹。这对"灵巧手数据多样性"是个实质限制。
- 不处理碰撞:生成失败一部分就来自撞物;靠成功筛硬扛,未来才补运动规划(SkillMimicGen)。
- 遮挡敏感:Threading <70%,作者归因第三人称相机看不到孔/线。
- 生成成功率本身可能低:BiGym 上低至 29%/43% → 难任务"放大效率"打折(要跑很多次才筛出成功)。
- 真机仅一个任务(Can Sorting)、40 条数据、红蓝两杯——真机泛化证据偏薄。
- 同分布评测:表II 的 D1/D2 是"用更宽分布数据训、再在同更宽分布测",不是 OOD 泛化。
7. 核心洞见¶
- 关键贡献是"协调建模"而非"数据变换":数据变换照搬 MimicGen,真正打开双手场景的是并行(异步)/协调(同步+同变换)/顺序(定序约束) 这套子任务分类法 + 执行机制。
- real2sim2real 闭环 + 数字孪生当安全闸是工程亮点:自动采真机数据且不撞坏硬件,把"仿真放大"接回了物理世界。
- DP > BC-RNN > BC-RNN-GMM(灵巧场景),与单臂时代结论相反——提示双手灵巧设定下策略架构选择需重做实验,这也是作者放数据集的意义。
🗣️ 外部评价¶
- 🌐 ICRA 2025 录用(IEEE Xplore 收录),NVIDIA + Yuke Zhu 组、MimicGen 同作者线 → 学术可信度高(证据 A)。来源:OpenReview 页、IEEE Xplore。
- 🌐 OpenReview 评审意见未公开:ICRA 审稿为闭门,
api.openreview.net查询该 forum 的 notes 返回 count=0,无公开打分/strength-weakness 文本可引。(如实记录:暂无逐条审稿可看。) - 🌐 themoonlight.io 的"Literature Review"(AI 自动生成的综述,非人类同行评审)给出的评价:优点=数据效率、并行/协调/顺序的任务分解、real-to-sim-to-real 落地、显著降低人力;并指出该自动综述未深入失败模式/计算开销/形态泛化等。来源:Moonlight review。⚠️ 此为机器生成,权重低,仅供参考。
- 🌐 另有 aimodels.fyi、alphaXiv 的论文条目(聚合/摘要类,非批判性评审)。
🧑⚖️ 审稿人视角(🤖)¶
- 新颖性偏中:方法是 MimicGen 的"双臂化"。真正的新机制(异步/同步/定序)扎实但概念上是工程化扩展,不是全新范式。
- 最该追问:① 手指动作只回放/局部插值,那"灵巧"放大到底放大了什么?②生成成功率(BiGym 29%)意味着难任务要海量试错才筛出数据,计算成本未充分讨论。③真机只 1 任务、40 条,真机泛化/OOD 证据弱。
- 强项:开源仿真+数据集+9 任务基准(社区价值高);real2sim2real 用数字孪生当安全闸的工程设计干净;消融较全(规模/Replay-Transform/顺序约束/架构)。
- 整体:作为"双手灵巧的 MimicGen + 一套基准",对社区是扎实的基础设施贡献,ICRA 录用合理;但别把它当"灵巧多样性自动生成"——它放大的主要是臂的末端轨迹。
8. 对我们(深一层)¶
- 数据护城河·放大端代表:直击"双手灵巧/人形操作数据稀缺",是 概念-机器人数据与标注 里"少示范→海量数据"路线的旗舰。与上游采数工具 卡片-DexPilot / 卡片-DexTeleop-0 互补:它们把"采得精/采得快"做好,DexMimicGen 把"采得少也能放大"做好。
- 与 卡片-RoboCat 对照:RoboCat 走"自生成+自改进"放大跨形态数据(真机+大模型记忆),DexMimicGen 走"仿真变换+回放+成功筛"放大单形态数据——两条放大路线,一个偏真机自举、一个偏仿真合成,可长期对照"数据放大"的两种范式。
- 可借机制:① 子任务分类(并行/协调/顺序)+ 异步/同步/定序执行,是任何双臂/多端协调采数/规划都能复用的抽象;② 数字孪生当安全闸(仿真跑通才发真机)这套 real2sim2real,对我们做真机数据采集的安全性很有参考。
- 要警惕的反面:它的"灵巧"多样性来自源演示(手指只回放)——若我们要真正放大接触/手指级多样性,这条路不够,得靠触觉闭环类(卡片-ReactiveDiffusionPolicy / 卡片-NeuralFeels)或更强的接触仿真。